11.2.57. ecmSxCfg_SetJerkRatio¶
Hint
FAST FUNCTION 모드 사용 가능
SYNOPSIS¶
t_cmdidx ecmSxCfg_SetJerkRatio(_FF)(
t_i32 NetID,
t_i32 Axis,
t_f64 JerkTimeRatio,
t_i32 *ErrCode
)
DESCRIPTION¶
이 함수들은 지정된 축이 S-CURVE 속도 프로파일을 사용하는 경우에 가속/감속 구간의 시간에 대해서 Jerk가 0이 아닌 구간의 시간 비율을 설정합니다.
PARAMETER¶
NetID : Network 번호
Axis : 대상 축 번호.
JerkTimeRatio : 가속구간 또는 감속구간에서 Jerk가 0이 아닌 구간의 시간 비율을 1.0기준으로 설정합니다(자세한 내용은 “참고” 항목 참고). 여기에 설정할 수 있는 값의 범위는 0.0 ~ 1.0 입니다.
ErrCode : 이 매개 변수를 통하여 현재의 에러 코드를 반환합니다. 단, 이 매개 변수에 NULL을 전달하면 에러 코드를 반환하지 않습니다.
REFERENCE¶
물리적 관점으로 저크(Jerk)는 가속도의 미분 값입니다.
저크(Jerk)가 0인 구간은 등가속도 구간입니다.
저크(Jerk), 가속도, 속도, 위치의 관계는 아래의 그래프와 같습니다. 여기서 시간이 t0 ~ t1인 구간과 t2 ~ t3인 구간은 Jerk가 0이 아닌 값을 가지는 구간입니다. 그리고 t1 ~ t2인 구간은 Jerk가 0인 구간입니다.
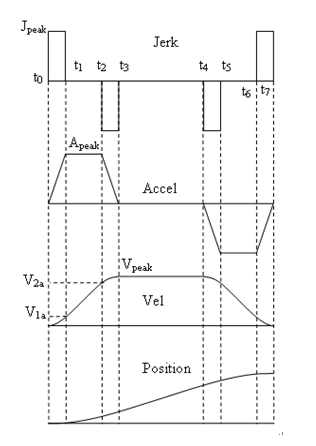
JerkTimeRatio 값은 전체 가속 시간 중에서 t0~t1과 t2~t3구간이 차지하는 비율을 나타냅니다. 예를 들어서 등가속구간이(t1~t2)이 가속시간의 30%를 차지한다면 JerkTimeRatio 는 0.7이 됩니다(왜냐하면 Jerk가 0이 아닌 구간은 1.0에서 등가속 구간을 뺀 것이 되므로). 마찬가지로 등가속구간이 가속시간의 70%를 차지한다면 JerkTimeRatio는 0.3이 될 것입니다.
JerkTimeRatio 값이 0이면 사다리꼴 속도패턴과 같아지게 되며, JerkTimeRatio가 1이면 완전한 S-Curve형태가 됩니다. JerkTimeRatio의 기본값은 0.66입니다.