13.1.24. ecmIxMot_ArcPos_A_Start¶
Hint
FAST FUNCTION 모드 사용 가능
SYNOPSIS¶
t_cmdidx ecmIxMot_ArcPos_A_Start(_FF)(
t_i32 NetID,
t_i32 MapIndex,
t_f64 XCentPos,
t_f64 YCentPos,
t_f64 XEndPos,
t_f64 YEndPos,
t_i32 *ErrCode
)
DESCRIPTION¶
중심좌표와 종점좌표를 매개변수로 하여 원호보간 이송을 수행합니다. 이때 중심좌표는 절대 좌표로 표현됩니다.
ecmIxMot_ArcPos_A_Start(_FF) 는 모션을 시작시킨 후에 바로 반환
PARAMETER¶
NetID : Network 번호
MapIndex : 맵 번호
XCentPos : 중심점의 X축 절대좌표 값
YCentPos : 중심점의 Y축 절대좌표 값
XEndPos : 원호보간 이동을 완료할 목표지점(End Point)의 X축 절대좌표 값
YEndPos : 원호보간 이동을 완료할 목표지점(End Point)의 Y축 절대좌표 값
ErrCode : 이 매개 변수를 통하여 현재의 에러 코드를 반환합니다. 단, 이 매개 변수에 NULL을 전달하면 에러 코드를 반환하지 않습니다.
RETURN VALUE¶
이 리턴값은 함수의 cmdidx가 반환됩니다.
REFERENCE¶
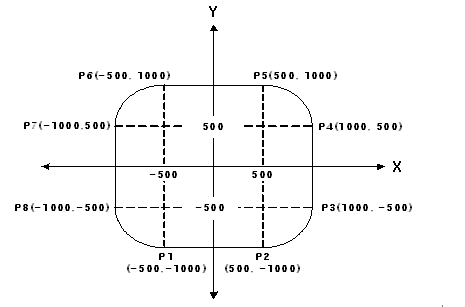
본 예제는 아래 그림과 같이 직선보간 이동과 원호보간 이동을 조합하는 Coordinated Motion을 수행하는 예제입니다. P1점으로부터 출발하여 P8점을 거쳐 다시 P1으로 복귀하는 작업입니다. 그리고 현재 위치가 P1의 위치에 있다고 가정합니다.
EXAMPLE¶
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 | #include "ComiEcatSdk_Api.h"
#define AXISX 0
#define AXISY 1
#define MAP0 0
#define MAP1 1
t_32 Error_Num = 0;//함수 별 에러 코드 저장 변수
/***************************************************************
* OnProgramInitial : 이 함수는 가상의 함수로서 프로그램 초기화 루틴이
* 적용되는 부분을 의미합니다.
***************************************************************/
void OnProgramInitial()
{
TEcDevInfo Device_Info; //디바이스 정보 저장 할 구조체
t_i32 Device_Num = 0;
t_success nIsLoaded = ecDll_Load ();
if(!ecGn_LoadDevices(&Error_Num)){ //장치 로드
//로드 실패시 예외 처리
}
if(!ecGn_GetDevInfo(Device_Num,&Device_Info, &Error_Num)){
//디바이스 정보 로드 실패 시 예외 처리
}
ecNet_SetAlState(Device_Info.NetIdx, ecAL_STATE_OP, &Error_Num);
//ALState OP모드로 전환
ecmSxCtl_SetSvon(Device_Info.NetIdx, AXISX, &Error_Num);
ecmSxCtl_SetSvon(Device_Info.NetIdx, AXISY, &Error_Num);
}
/***************************************************************
* OnSetSpeed : 이 함수는 속도설정의 변경이 필요할 때
* 호출되는 가상의 함수 입니다.
***************************************************************/
void OnSetSpeed()
{
ecmIxCfg_MapAxes (Device_Info.NetIdx , MAP0, AXISX | AXISY, 0, ecmIX_MODE_LINEAR , &Error_Num);
ecmIxCfg_MapAxes (Device_Info.NetIdx , MAP0, AXISX | AXISY, 0, ecmIX_MODE_LINEAR , &Error_Num);
ecmIxCfg_SetSpeedPatt( Device_Info.NetIdx , MAP0, 0, 0, 0, 40000, 10000, 10000, &Error_Num);
ecmIxCfg_SetSpeedPatt( Device_Info.NetIdx , MAP1, 0, 0, 0, 40000, 10000, 10000, &Error_Num);
//보간 그룹에 축을 설정하고
//MAP0은 직선 보간 모드 MAP1은 원호 보간 모드 로 설정
}
/**************************************************************
* OnDoMotion() : 작업명령시에 호출되는 가상의 함수
**************************************************************/
void OnDoMotion()
{
double fDistList[2];
// Move from P1 to P2 //
fDistList[0]=1000; fDistList[1]=500;
ecmIxMot_LineToStart (Device_Info.NetIdx, MAP0, fDistList, &Error_Num);
// Move from P2 to P3 //
ecmIxMot_ArcPos_A_Start (Device_Info.NetIdx, MAP1, 500, -500, 1000, -500, &Error_Num);
// Move from P3 to P4 //
fDistList[0]=1000; fDistList[1]=500;
ecmIxMot_LineToStart (Device_Info.NetIdx, MAP0, fDistList, &Error_Num);
// Move from P4 to P5 //
ecmIxMot_ArcPos_A_Start (Device_Info.NetIdx, MAP1,500, 500, 500, 1000, &Error_Num);
// Move from P5 to P6 //
fDistList[0]=-500; fDistList[1]=1000;
ecmIxMot_LineToStart (Device_Info.NetIdx, MAP0, fDistList, &Error_Num);
// Move from P6 to P7 //
ecmIxMot_ArcPos_A_Start (Device_Info.NetIdx, MAP1, -500, 500, -1000, 500, &Error_Num);
// Move from P7 to P8 //
fDistList[0]=-1000; fDistList[1]=-500;
ecmIxMot_LineToStart (Device_Info.NetIdx, MAP0, fDistList, &Error_Num);
// Move from P8 to P1 //
ecmIxMot_ArcPos_A_Start (Device_Info.NetIdx, MAP1,-500,-500,-500,-1000, &Error_Num);
}
|