11.1.7. cmlPmCfgGetOutMode¶
SYNOPSYS¶
VT_I4 cmlPmCfgGetOutMode ([in] VT_I4 BoardID, [in] VT_I4 NodeId, [in] VT_I4 Channel, [out] VT_PI4 OutputMode )
DESCRIPTION¶
cmlPmCfgSetOutMode() 함수는 Command 펄스의 출력 모드를 설정합니다. Command 신호에 대한 하드웨어적인 회로는 별도로 제공되는 “ceMC02P” HW매뉴얼의 “6.1.1 COMMAND 신호 (CW, CCW)” 단원을 참조하시기 바랍니다.
cmlPmCfgGetOutMode() 함수는 현재 설정된 Command 펄스 출력 모드를 반환합니다.
이 함수의 사용과 호출에 있어, 제공된 ㈜커미조아의 함수 헤더 Visual Basic 에서는 함수의 첨두어 cml 가 붙지 않습니다.
PARAMETER¶
▶ BoardID : 사용자가 설정한 디바이스(보드) ID.
▶ NodeId : 사용자가 제어하고자 하는 노드 번호.
▶Channel : 축 번호. 통합 축으로 관리되는 축 번호를 의미하며, 상수 값으로 0 (Zero Based) 이상, 최대 통합 축 개수 - 1 이하의 값을 축 번호로 설정할 수 있습니다.
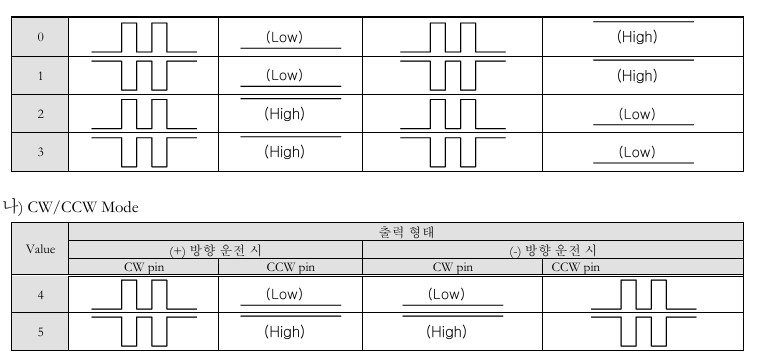
▶ OutputMode : Command 펄스 출력 모드의 설정 값입니다. 출력 모드는 다음과 같이 6가지 모드를 가집니다.

RETURN VALUE¶
Value |
Meaning |
|---|---|
음수 |
수행 실패 |
0(ERR_NONE) |
수행 성공 |
REFERENCE¶
모든 경우에 해당하는 부분은 아니지만, 지령 펄스(Command Pulse)의 출력 설정 형태는 일반적으로 서보드라이브에서는 4 혹은 5 번 모드인 CW/CCW 모드를 주로 사용하며, 스텝드라이브에서는 0번에서 3 번까지의 OUT/DIR 모드를 주로 사용합니다.
일반적인 서보드라이브에서 CW/CCW 혹은 OUT/DIR 모드를 결정하기 위한 지령 펄스(Command Pulse) 입력 설정이 존재합니다. 서보드라이브의 매뉴얼을 반드시 참조하여, ㈜커미조아 모션 모듈과 동일하게 설정하여 주십시오. 동일하게 설정이 되지 않았을 경우에는, 다음과 같은 현상이 발생할 수 있습니다.
1. 서보드라이브를 통해 동작하는 모터의 방향이 한 방향으로만 동작하고 다른 방향으로는 동작하지 않습니다. 즉, 음의 방향(Negative Direction) 으로는 동작하는데 양의 방향(Positive Direction) 으로는 동작하지 않거나 그 반대의 경우를 의미합니다.
2. 방향이 전환 될 때마다 1 펄스(Pulse) 이내의 지령 펄스(Command Pulse) 입력을 무시하게 됩니다. 이 현상을 확인하시려면, 서보드라이브의 Command Pulse Counter 와 ㈜커미조아의 모션 모듈의 Command Pulse Counter 와의 연속적인 방향전환 이동 시에 Pulse Counter 차이를 모니터링(Monitoring) 하시면 됩니다.
이외에도 스텝드라이브의 경우에는 드라이브 입력 부 회로의 사양에 따라 Open Collector 연결을 주로 사용하는데, 결선 방법과 상태에 따라서 일반적인 모터의 움직임에 이상 상황이 발생할 수 있습니다. 이때에는 해당 스텝드라이브의 입력 부 사양을 첨부하여, ㈜커미조아 고객 지원 팀으로 문의해 주시면 친절하게 상담하여 드리겠습니다.
EXAMPLE¶
1 2 3 4 5 6 7 8 9 10 | C/C++
#include “ComiMLink2_SDK.h”
#include “ComiMLink2_SDK_Def.h”
long nChannel = 0;//0번 축을 선택합니다.
long nOutputMode = 0;
long BoardID = 0;
//0번 축의 Output Mode를 CWCCW0로 설정합니다.
cmlPmCfgSetOutMode (BoardID, 0, nChannel, ccmlOMODE_CWCCW0 );
//0번 축의 Output Mode 상태를 nOutputMode변수를 통해서 반환 받습니다.
cmlPmCfgGetOutMode (BoardID, 0, nChannel, &nOutputMode );
|