cmmIxArcP¶
SYNOPSIS¶
VT_I4 cmmIxArcP(
[in] VT_I4 MapIndex, [in] VT_R8 XCentOffset, [in] VT_R8 YCentOffset, [in] VT_R8 XEndPointDist,
[in] VT_R8 YEndPointDist, [in] VT_I4 Direction, [in] VT_I4 IsBlocking
)
DESCRIPTION¶
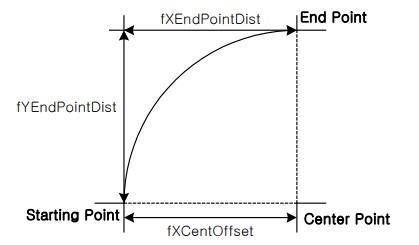
중심좌표와 종점좌표를 매개 변수로 하여 원호보간이동을 수행합니다. 이때 각 좌표는 상대좌표로 표현됩니다. cmmIxArcP() 함수는 모션이 완료되기 전까지 반환되지 않으며, cmmIxArcPStart() 함수는 모션을 시작시킨 후에 바로 반환됩니다. 원호보간은 임의의 두 축에 대해서 적용됩니다. 아래 설명에서는 맵핑된 두 축을 X, Y 축으로 간주하여 설명합니다. 여기서 X 축이라 함은 맵핑된 두 축 중에서 축번호가 낮은 축을 의미하며 Y 축은 축번호가 높은 축을 의미합니다. 예를 들어 Z 축과 U 축이 맵핑된 두 축이라면 Z 축이 X 축에 해당하며 U 축이 Y 축에 해당합니다.
PARAMETER¶
MapIndex : 맵번호(Map index), 이 맵번호를 사용하기전에 먼저 cmmIxMapAxes() 함수를 통하여 해당 맵번호에 유효한 축들이 맵핑되어 있어야 합니다.
XCentOffset : 현재 위치(시작 위치)로부터 원의 중심까지 X 축상의 거리.
YCentOffset : 현재 위치(시작 위치)로부터 원의 중심까지 Y 축상의 거리
XEndPointDist : 원호보간 이동을 완료할 목표지점의 현재 위치로부터 X-축상 거리값.
YEndPointDist : 원호보간 이동을 완료할 목표지점의 현재 위치로부터 Y-축상 거리값.
Direction : 회전 방향을 지정합니다.
Value |
Meaning |
|---|---|
0 또는 cmARC_CW |
시계 방향(CW)으로 회전 |
1 또는 cmARC_CCW |
반시계 방향(CCW)으로 회전 |
IsBlocking : 완료될 때까지 기다리는 동안 윈도우 메시지를 블록(Blocking)할 것인지를 결정합니다.
Value |
Meaning |
|---|---|
cmFALSE |
블록(Blocking)을 하지 않습니다. 따라서 해당 모션이 완료되는 동안에도 윈도우 이벤트를 처리합니다. |
cmTRUE |
블록(Blocking)을 합니다. 따라서 해당 모션이 완료되는 동안에는 윈도우 이벤트가 처리되지 않습니다. |
RETURN VALUE¶
Value |
Meaning |
|---|---|
음수 |
수행 실패 |
cmERR_NONE |
수행 성공 |
REFERENCE¶
논리적 거리 단위는 cmmCfgSetUnitDist() 함수에 의해 결정됩니다.
cmmIxArcPStart() 함수를 사용하는 경우에는 cmmIxIsDone() 함수나 cmmIxWaitDone() 함수를 사용하여 모션의 완료를 확인할 수 있습니다.
cmmIxArcP() 함수를 사용하는 경우에는 내부적으로 루프를 수행하면서 모션이 완료되기를 기다리는데, 이때 “Blocking Mode”설정에 따라 윈도우 이벤트를 처리하는 방식이 달라집니다.
cmmIxArcP() 함수를 사용하는 경우에는 INP 입력신호가 Enable 로 설정되었으면 Command 펄스 출력이 완료되어도 INP 입력이 ON 이 되기 전까지는 모션이 완료되지 않은 것으로 간주되어 반환되지 않습니다. 스탭 드라이브는 INP 출력이 없는 경우가 일반적인데, 고객님의 부주의나 잘못된 설정으로 INP 입력에 대한 설정이 Enable 로 되어 있을 경우 INP 입력이 스탭 드라이브를 통해 발생하지 않는 이유 때문에 모션 완료가 되지 않는 경우가 발생할 수 있습니다. 고객 여러분들께서는 스탭 드라이브 사용시에 이점을 주의해주시기를 부탁드립니다.
Note
윈도우 이벤트라는 것은 무엇입니까? 윈도우 운영체제는 EVent Driven 혹은 Message Driven 방식의 구조로 되어 있습니다. 각 응용프로그램은 메시지 큐(Queue)를 가지고 있으며, 정확히 말하면, 메시지를 사용해 이벤트를 통지하는 방시긍로 설계되어 있습니다. 윈도우 메시지를 처리한다는 것은 메시지 큐에서 메시지를 하나씩 꺼내서 윈도우 프로시저에 전송한다는 것을 의미하며, 이걱은 그 행선지가 되는 윈도우에 전송되어 처리됩니다.
EXAMPLE 1¶
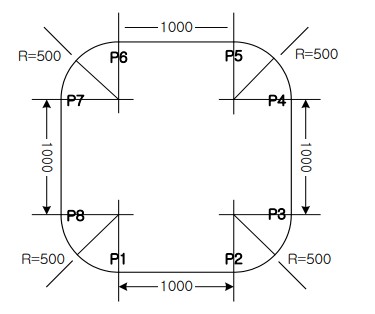
본 예제는 아래 그림과 같이 직선보간 이동과 원호보간 이동을 조합하는 Coordinated Motion 을 수행하는 예제입니다. P1 점으로부터 출발하여 P8 점을 거쳐 다시 P1 으로 복귀하는 작업입니다.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 | C/C++
#include "Cmmsdk.h"
#include "CmmsdkDef.h"
/***************************************************************
* OnProgramInitial : 이 함수는 가상의 함수로서 프로그램 초기화 루틴이
* 적용되는 부분을 의미합니다.
***************************************************************/
void OnProgramInitial()
{
long m_nNumAxes;
cmmLoadDll();
if(cmmGnDeviceLoad(cmTRUE, &m_nNumAxes) != cmERR_NONE)
{
//Handle 은 사용자가 생성한 폼의 핸들 값입니다.
cmmErrShowLast(Handle);
return;
}
}
/***************************************************************
* OnSetSpeed : 이 함수는 속도설정의 변경이 필요할 때
* 호출되는 가상의 함수 입니다.
***************************************************************/
#define MAP0 0 //맵번호 (0)
void OnSetSpeed()
{
cmmIxMapAxes(MAP0, cmX1_MASK | cmY1_MASK, 0 );
//또는 cmmIxMapAxes(MAP0, 0x3, 0x0);
//보간 이동할 축들의 기본속도를 설정합니다.
cmmCfgSetSpeedPattern(cmX1, cmSMODE_T, 1000, 5000, 5000);
cmmCfgSetSpeedPattern(cmY1, cmSMODE_T, 1000, 5000, 5000);
}
/**************************************************************
* OnDoMotion() : 작업명령시에 호출되는 가상의 함수
**************************************************************/
void OnDoMotion()
{
double fDistList[2];
//MAP0 를 마스터 속도 모드, Trapezoidal 속도 패턴으로 작업속도의 100%,
//가속도의 70%, 감속도의 70%로 설정 합니다.
cmmIxSetSpeedPattern(MAP0, cmFALSE, cmSMODE_T, 100, 70, 70 );
// Move from P1 to P2 //
fDistList[0]=1000; fDistList[1]=0;
cmmIxLine(MAP0, fDistList, cmFALSE);
// Move from P2 to P3 //
cmmIxArcP(MAP0, 0, 500, 500, 500, cmARC_CCW, cmFALSE);
// Move from P3 to P4 //
fDistList[0]=0; fDistList[1]=1000;
cmmIxLine(MAP0, fDistList, cmFALSE);
// Move from P4 to P5 //
cmmIxArcP(MAP0, -500, 0, -500, 500, cmARC_CCW, cmFALSE);
// Move from P5 to P6 //
fDistList[0]=-1000; fDistList[1]=0;
cmmIxLine(MAP0, fDistList, cmFALSE);
// Move from P6 to P7 //
cmmIxArcP(MAP0, 0, -500, -500, -500, cmARC_CCW, cmFALSE);
// Move from P7 to P8 //
fDistList[0]=0; fDistList[1]=-1000;
cmmIxLine(MAP0, fDistList, cmFALSE);
// Move from P8 to P1 //
cmmIxArcP(MAP0, 500, 0, 500, -500, cmARC_CCW, cmFALSE);
}
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 | Visual Basic
Dim nIxMap As Long ‘ 보간 맵 설정
nIxMap = 0
Private Sub OnSetIxConfig ()
‘ 0 번 축과 1 번 축을 보간 맵으로 설정합니다.
Call cmmIxMapAxes ( nIxMap, cmX1_MASK Or cmY1_MASK, 0 )
‘ 각 축의 속도를 설정합니다.
Call cmmCfgSetSpeedPattern (cmX1, cmSMODE_T, 1000, 5000, 5000 )
Call cmmCfgSetSpeedPattern (cmY1, cmSMODE_T, 1000, 5000, 5000 )
End Sub
Private Sub OnIxArcP_Move ()
Dim fDistList(2) As Double
‘ 맵에 포함된 축의 속도 비율을 설정합니다.
Call cmmCfgSetSpeedPattern ( nIxMap, cmFALSE, cmSMODE_T, 100, 70, 70 )
‘ P1 에서 P2 로 이송합니다.
fDistList(0) = 1000
fDistList(1) = 0
Call cmmIxLine ( nIxMap, fDistList(0), cmFALSE )
‘ P2 에서 P3 로 이송합니다.
Call cmmIxArcP ( nIxMap, 0, 500, 500, 500, cmARC_CCW, cmFALSE )
‘ P3 에서 P4 로 이송합니다.
fDistList(0) = 0
fDistList(1) = 1000
Call cmmIxLine ( nIxMap, fDistList(0), cmFALSE )
‘ P4 에서 P5 로 이송합니다.
Call cmmIxArcP ( nIxMap, -500, 0, -500, 500, cmARC_CCW, cmFALSE )
‘ P5 에서 P6 로 이송합니다.
fDistList(0) = -1000
fDistList(1) = 0
Call cmmIxLine ( nIxMap, fDistList(0), cmFALSE )
‘ P6 에서 P7 로 이송합니다.
Call cmmIxArcP ( nIxMap, 0, -500, -500, -500, cmARC_CCW, cmFALSE )
‘ P7 에서 P8 로 이송합니다.
fDistList(0) = 0
fDistList(1) = -1000
Call cmmIxLine ( nIxMap, fDistList(0), cmFALSE )
‘ P8 에서 P1 로 이송합니다.
Call cmmIxArcP ( nIxMap, 500, 0, 500, -500, cmARC_CCW, cmFALSE )
End Sub
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 | Delphi
var
nIxMap : LongInt; // 보간 맵 설정
begin
nIxMap := 0;
end;
procedure OnSetIxConfig ();
begin
// 0 번 축과 1 번 축을 보간 맵으로 설정합니다.
cmmIxMapAxes ( nIxMap, cmX1_MASK or cmY1_MASK, 0 );
// 각 축의 속도를 설정합니다.
cmmCfgSetSpeedPattern (cmX1, cmSMODE_T, 1000, 5000, 5000 );
cmmCfgSetSpeedPattern (cmY1, cmSMODE_T, 1000, 5000, 5000 );
end;
procedure OnIxArcP_Move ();
var
fDistList : Array[0..1] of Double;
begin
// 맵에 포함된 축의 속도 비율을 설정합니다.
cmmCfgSetSpeedPattern ( nIxMap, cmSMODE_T, 100, 70, 70 );
// P1 에서 P2 로 이송합니다.
fDistList[0] := 1000;
fDistList[1] := 0;
cmmIxLine ( nIxMap, @fDistList, cmFALSE );
// P2 에서 P3 로 이송합니다.
cmmIxArcP ( nIxMap, 0, 500, 500, 500, cmARC_CCW, cmFALSE );
// P3 에서 P4 로 이송합니다.
fDistList[0] := 0;
fDistList[1] := 1000;
cmmIxLine ( nIxMap, @fDistList, cmFALSE );
// P4 에서 P5 로 이송합니다.
cmmIxArcP ( nIxMap, -500, 0, -500, 500, cmARC_CCW, cmFALSE );
// P5 에서 P6 로 이송합니다.
fDistList[0] := -1000;
fDistList[1] := 0;
cmmIxLine ( nIxMap, @fDistList, cmFALSE );
// P6 에서 P7 로 이송합니다.
cmmIxArcP ( nIxMap, 0, -500, -500, -500, cmARC_CCW, cmFALSE );
// P7 에서 P8 로 이송합니다.
fDistList[0] := 0;
fDistList[1] := -1000;
cmmIxLine ( nIxMap, @fDistList, cmFALSE );
// P8 에서 P1 로 이송합니다.
cmmIxArcP ( nIxMap, 500, 0, 500, -500, cmARC_CCW, cmFALSE );
end;
|
See also