cmcPmIxGetSpeedPattern_T¶
SYNOPSYS¶
VT_I4 cmcPmIxGetSpeedPattern_T ([in] VT_I4 BoardID, [in] VT_I4 NodeId, [in] VT_I4 MapIndex,
[out] VT_PI4 IsVectorSpeed, [out] VT_PI4 SpeedMode, [out] VT_PR8 Vel,
[out] VT_PR8 Acc_T, [out] VT_PR8 Dec_T )
DESCRIPTION¶
cmcPmIxGetSpeedPattern_T() 함수는 “기본보간제어” 의 이송 속도에 대한 설정된 값을 반환합니다.
보간 작업 속도를 벡터속도로 설정해야만 하는 특별한 경우를 제외하고는 보간 작업 속도를 마스터속도로 설정하는 것이 모터의 최대속도를 활용하는데 있어서 편리합니다.
이 함수의 사용과 호출에 있어, 제공된 ㈜커미조아의 함수 헤더 Visual Basic 에서는 함수의 첨두어 cmc 가 붙지 않습니다.
PARAMETER¶
▶ BoardID : 사용자가 설정한 디바이스(보드) ID.
▶ NodeId : 노드 번호. 노드 번호는 3부터 시작합니다.
▶ MapIndex : 맵 번호(Map index), 이 맵번호를 사용하기 전에 먼저 cmcPmIxMapAxes() 함수를 통하여 해당 맵번호에 유효한 축들이 맵핑 되어 있어야 합니다.
▶ IsVectorSpeed : 벡터 속도 또는 마스터 속도 모드를 설정 혹은 반환합니다.
Value |
Meaning |
|---|---|
0(cmcFALSE) |
마스터 속도 모드. (Master Speed Mode) |
1(cmcTRUE) |
벡터 속도 모드. (Vector Speed Mode) |
▶ SpeedMode : cmcPmIxSetSpeedPattern_T 함수의 인자이며, 속도모드를 설정합니다. 설정값은 다음과 같습니다.
Value
Meaning
0 (cmcMODE_C)
CONSTANT 속도모드 => 가감속을 수행하지 않습니다.
1 (cmcMODE_T)
TRAPEZOIDAL 속도모드 => 사다리꼴 가감속을 수행합니다.
2 (cmcMODE_S)
S-CURVE 속도모드 => S-CURVE 가감속을 수행합니다.
▶ Vel : 마스터 속도 모드 일 때는 작업속도 비율(%)을 설정 혹은 반환합니다. 벡터 속도 모드 일 때는 PPS단위를 사용하여 설정 혹은 반환합니다.
▶ AccTime : 가속 시간을 설정 혹은 반환합니다.
▶ DecTime : 감속 시간을 설정 혹은 반환합니다.
REFERENCE¶
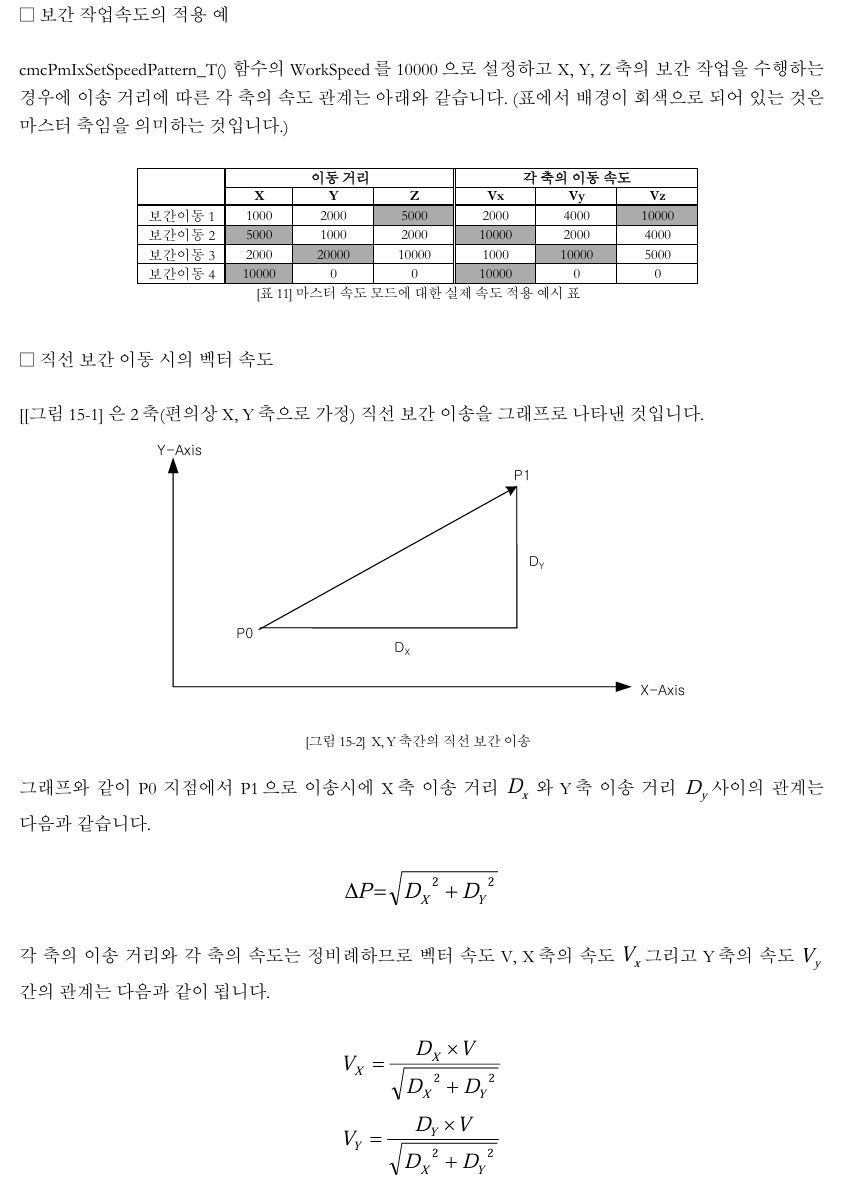
마스터 속도 모드(Master Speed Mode)로 보간 작업 시에는 각 축의 속도가 각 축의 이송거리에 비례하여 자동으로 설정됩니다. 이때 cmcPmIxSetSpeedPattern_T() 함수의 WorkSpeed 매개 변수를 통하여 지정되는 보간 작업속도는 마스터 속도로 적용됩니다. 각 보간 이송시에 이송거리가 가장 큰 축을 “마스터 축” 이라고 하며 마스터 축의 속도를 “마스터 속도”라 합니다. 각 보간 이송시에 마스터 축의 속도는 사용자가 지정한 보간 작업속도로 설정되며, 마스터 축 이외의 다른 축의 속도는 마스터 축과 해당 축의 이송 거리 비에 따라서 자동으로 설정됩니다.
RETURN VALUE¶
Value |
Meaning |
|---|---|
음수 |
수행 실패 |
ERR_NONE |
수행 성공 |