cmsIxArcPToStart¶
SYNOPSYS¶
VT_I4 cmsIxArcPToStart([in] VT_I4 BoardId, [in] VT_I4 MapIndex, [in] VT_R8 XCent,
[in] VT_R8 YCent, [in] VT_R8 XEndPos,
[in] VT_R8 YEndPos, [in] VT_I4 Direction)
DESCRIPTION¶
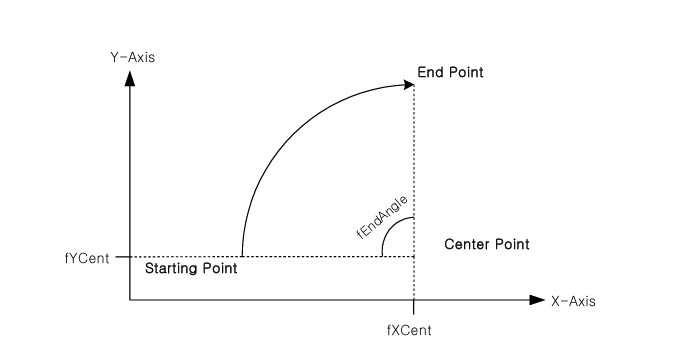
중심좌표와 종점좌표를 매개 변수(媒介變數)로 하여 원호보간이동을 수행합니다. 이때 각 좌표는 절대좌표로 표현됩니다. cmsIxArcPTo() 함수는 모션이 완료되기 전까지 반환되지 않으며, cmsIxArcPToStart() 함수는 모션을 시작시킨 후에 바로 반환됩니다.
원호보간은 임의의 두 축에 대해서 적용됩니다. 아래 설명에서는 맵핑된 두 축을 X, Y축으로 간주하여 설명합니다. 여기서 X축이라 함은 맵핑된 두 축 중에서 축번호가 낮은 축을 의미하며 Y축은 축번호가 높은 축을 의미합니다. 예를 들어 Z축과 U축이 맵핑된 두 축이라면 Z축이 X축에 해당하며 U축이 Y축에 해당합니다.
원호보간은 임의의 두 축에 대해서 적용됩니다. 아래 설명에서는 맵핑된 두 축을 X, Y축으로 간주하여 설명합니다. 여기서 X축이라 함은 맵핑된 두 축 중에서 축번호가 낮은 축을 의미하며 Y축은 축번호가 높은 축을 의미합니다. 예를 들어 Z축과 U축이 맵핑된 두 축이라면 Z축이 X축에 해당하며 U축이 Y축에 해당합니다.
이 함수의 사용과 호출에 있어, 제공된 ㈜커미조아의 함수 헤더 Visual Basic 에서는 함수의 첨두어 cms 가 붙지 않습니다.
PARAMETER¶
▶ BoardId: 사용자가 설정한 디바이스(보드) ID.
▶ MapIndex : 맵번호(Map index), 이 맵번호를 사용하기전에 먼저 cmsIxMapAxes() 함수를 통하여 해당 맵번호에 유효한 축들이 맵핑되어 있어야 합니다.
▶ XCent : 중심점의 X축 절대좌표값
▶ YCent : 중심점의 Y축 절대좌표값
▶ XEndPos : 원호보간 이동을 완료할 목표지점(End point)의 X축 절대좌표값
▶ YEndPos : 원호보간 이동을 완료할 목표지점(End point)의 Y축 절대좌표값
▶ Direction : 회전 방향을 지정합니다.
Value
Meaning
0 또는 cmsARC_CW
시계 방향(CW)으로 회전
1 또는 cmsARC_CCW
반시계 방향(CCW)으로 회전
▶ IsBlocking : 완료될 때까지 기다리는 동안 윈도우 메시지를 블록(Blocking)할 것인지를 결정합니다.
Value
Meaning
RETURN VALUE¶
Value |
Meaning |
|---|---|
음수 |
수행 실패 |
ERR_NONE |
수행 성공 |
REFERENCE¶
cmsIxArcPToStart() 함수를 사용하는 경우에는 cmsIxIsDone() 함수나 cmsIxWaitDone() 함수를 사용하여 모션의 완료를 확인(確認)할 수 있습니다.
cmsIxArcPTo() 함수를 사용하는 경우에는 내부적으로 루프를 수행하면서 모션이 완료되기를 기다리는데, 이때 “Blocking Mode”설정에 따라 윈도우 이벤트를 처리하는 방식이 달라집니다. 그러나 일반적으로 윈도우의 작업 쓰레드(Work Thread) 에서는 블록모드를 사용하여, 함수내부에서 지연없이 쓰레드 내부의 작업에 집중할 수 있도록 설정하는 것이 바람직합니다.
cmsIxArcPTo() 함수를 사용하는 경우에는 INP 입력신호가 Enable로 설정되었으면 Command 펄스 출력이 완료되어도 INP 입력이 ON이 되기 전까지는 모션이 완료되지 않은 것으로 간주되어 반환되지 않습니다.
Note
“윈도우 이벤트라는 것은 무엇입니까?” 윈도우 운영체제는 Event Driven 혹은 Message Driven 방식1의 구조로 되어 있습니다. 각 응용프로그램은 메시지 큐(Queue)를 가지고 있으며, 정확히 말하면, 메시지를 사용해 이벤트를 통지하는 방식으로 설계되어 있습니다. 윈도우 메시지를 처리한다는 것은 메시지 큐에서 메시지를 하나씩 꺼내서 윈도우 프로시저에 전송한다는 것을 의미하며, 이것은 그 행선지가 되는 윈도우에 전송되어 처리됩니다.
EXAMPLE¶
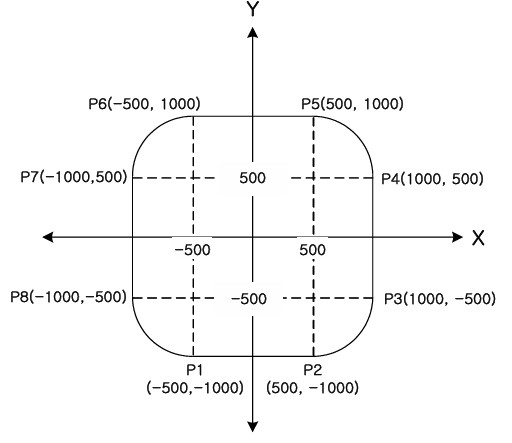
본 예제는 아래 그림과 같이 직선보간 이동과 원호보간 이동을 조합하는 Coordinated Motion을 수행하는 예제입니다. P1점으로부터 출발하여 P8점을 거쳐 다시 P1으로 복귀하는 작업입니다. 그리고 현재 위치가 P1의 위치에 있다고 가정합니다.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 | C/C++
#define DEV0
0
#include "ComiSSCNET3_SDK.h"
#include "ComiSSCNET3_SDK_Def.h"
/***************************************************************
* OnProgramInitial : 이 함수는 가상의 함수로서 프로그램 초기화 루틴이
* 적용되는 부분을 의미합니다.
***************************************************************/
void OnProgramInitial()
{
}
long m_nNumDevices;
long m_DeviceList[16];
long m_nNumAxes;
cmsLoadDll();
if(cmsGnLoadDevice(&m_nNumDevices, m_DeviceList, &m_nNumAxes) != ERR_NONE)
{
//Handle 은 사용자가 생성한 폼의 핸들 값입니다.
// 에러메시지 출력
return;
}
/***************************************************************
* OnSetSpeed : 이 함수는 속도설정의 변경이 필요할 때
* 호출되는 가상의 함수 입니다.
* ***************************************************************/
#define MAP0 0 //맵번호 (0)
#define MAP1 1 //맵번호 (1)
void OnSetSpeed()
{
cmsIxMapAxes(DEV0, MAP0, cmsX1_MASK | cmsY1_MASK, cmsIX_MODE_LINEAR);
cmsIxMapAxes(DEV0, MAP1, cmsX1_MASK | cmsY1_MASK, cmsIX_MODE_CIRCULAR );
//또는 cmsIxMapAxes(DEV0, MAP0, 0x3, cmsIX_MODE_LINEAR);
//cmsIxMapAxes(DEV0, MAP1, 0x3, cmsIX_MODE_CIRCULAR);
//보간 이동할 축들의 기본속도를 설정합니다.
cmsCfgSetSpeedPattern(DEV0, 0, cmsSMODE_T, 1000, 5000, 5000,0,0);
cmsCfgSetSpeedPattern(DEV0, cmsY1, cmsSMODE_T, 1000, 5000, 5000,0,0);
}
/**************************************************************
* OnDoMotion() : 작업명령시에 호출되는 가상의 함수
**************************************************************/
void OnDoMotion()
{
double fPosList[2];
//MAP0를 마스터 속도 모드, Trapezoidal 속도 패턴으로 작업속도의 100%,
//가속도의 70%, 감속도의 70%로 설정 합니다.
cmsIxSetSpeedPattern(DEV0, MAP0, cmsFALSE, cmsSMODE_T,0,0, 100, 70, 70 );
cmsIxSetSpeedPattern(DEV0, MAP1, cmsFALSE, cmsSMODE_T,0,0, 100, 70, 70 );
// Move from P1 to P2 //
fPosList[0]=500; fPosList[1]=-1000;
cmsIxLineTo(DEV0, MAP0, fPosList, cmsFALSE);
// Move from P2 to P3 //
cmsIxArcPTo(DEV0, MAP1, 500, -500, 1000, -500, cmsARC_CCW, cmsFALSE);
// Move from P3 to P4 //
fPosList[0]=1000; fPosList[1]=500;
cmsIxLineTo(DEV0, MAP0, fPosList, cmsFALSE);
// Move from P4 to P5 //
cmsIxArcPTo(DEV0, MAP1, 500, 500, 500, 1000, cmsARC_CCW, cmsFALSE);
// Move from P5 to P6 //
fPosList[0]=-500; fPosList[1]=1000;
cmsIxLineTo(DEV0, MAP0, fPosList, cmsFALSE);
// Move from P6 to P7 //
cmsIxArcPTo(DEV0, MAP1, -500, 500, -1000, 500, cmsARC_CCW, cmsFALSE);
// Move from P7 to P8 //
fPosList[0]=-1000; fPosList[1]=-500;
cmsIxLineTo(DEV0, MAP0, fPosList, cmsFALSE);
// Move from P8 to P1 //
cmsIxArcPTo(DEV0, MAP1,-500, -500, -500, -1000, cmsARC_CCW, cmsFALSE);
}
-----------------------------------------------------------
Visual Basic
‘맵번호 MAP0, MAP1은 이미 선언되어 있다고 가정함.
Const DEV0 = 0
'/**************************************************************
'* OnSetSpeed : 이 함수는 속도설정의 변경이 필요할 때
'* 호출되는 가상의 함수 입니다.
'**************************************************************/
Private Sub OnSetSpeed()
Call IxMapAxes(MAP0, &H3, cmsIX_MODE_LINEAR) '//&H3 = 0 | cmsY1
Call IxMapAxes(MAP1, &H3, cmsIX_MODE_CIRCULAR) '//&H3 = 0 | cmsY1
'//보간 이동할 축들의 기본속도를 설정합니다.
Call CfgSetSpeedPattern(DEV0, 0, cmsSMODE_T, 1000, 5000, 5000,0,0)
Call CfgSetSpeedPattern(DEV0, cmsY1, cmsSMODE_T, 1000, 5000, 5000,0,0)
End Sub
'/**************************************************************
'* OnDoMotion() : 작업명령시에 호출되는 가상의 함수
'**************************************************************/
Private Sub OnDoMotion()
Dim fPosList(2) As Double
'//MAP0를 마스터 속도 모드, Trapezoidal 속도 패턴으로 작업속도의 100%,
'//가속도의 70%, 감속도의 70%로 설정 합니다.
Call IxSetSpeedPattern(DEV0, MAP0, cmsFALSE, cmsSMODE_T,0,0, 100, 70, 70)
Call IxSetSpeedPattern(DEV0, MAP1, cmsFALSE, cmsSMODE_T,0,0, 100, 70, 70)
'// Move from P1 to P2 //
fPosList(0) = 500
Call IxLineTo(DEV0, MAP0, fPosList(0), cmsFALSE)
'// Move from P2 to P3 //
Call IxArcPTo(DEV0, MAP1, 500, -500, 1000, -500, cmsARC_CCW, cmsFALSE)
'// Move from P3 to P4 //
fPosList(0) = 1000
fPosList(1) = 500
Call IxLineTo(DEV0, MAP0, fPosList(0), cmsFALSE)
'// Move from P4 to P5 //
Call IxArcPTo(DEV0, MAP1, 500, 500, 500, 1000, cmsARC_CCW, cmsFALSE)
'// Move from P5 to P6 //
fPosList(0) = -500
fPosList(1) = 1000
Call IxLineTo(DEV0, MAP0, fPosList(0), cmsFALSE)
'// Move from P6 to P7 //
Call IxArcPTo(DEV0, MAP1, -500, 500, -1000, 500, cmsARC_CCW, cmsFALSE)
'// Move from P7 to P8 //
fPosList(0) = -1000
fPosList(1) = -500
Call IxLineTo(DEV0, MAP0, fPosList(0), cmsFALSE)
'// Move from P8 to P1 //
Call IxArcPTo(DEV0, MAP1, -500, -500, -500, -1000, cmsARC_CCW, cmsFALSE)
End Sub
-----------------------------------------------------------
|
EXAMPLE2¶
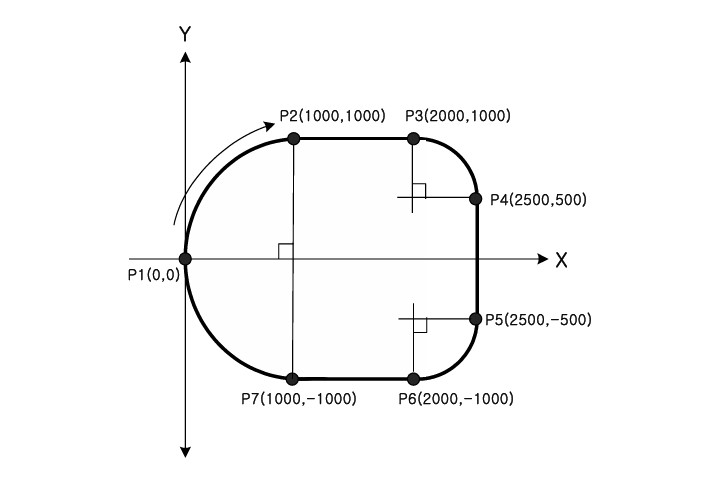
본 예제는 아래 그림과 같이 직선보간 이동과 원호보간 이동을 조합하는 Coordinated Motion을 수행하는 예제입니다. P1점으로부터 출발하여 P8점을 거쳐 다시 P1으로 복귀하는 작업입니다. 그리고 현재 위치가 P1의 위치에 있다고 가정합니다.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 | C/C++
#define DEV0
0
#include "ComiSSCNET3_SDK.h"
#include "ComiSSCNET3_SDK_Def.h"
/***************************************************************
* OnProgramInitial : 이 함수는 가상의 함수로서 프로그램 초기화 루틴이
* 적용되는 부분을 의미합니다.
***************************************************************/
void OnProgramInitial()
{
}
long m_nNumDevices;
long m_DeviceList[16];
long m_nNumAxes;
cmsLoadDll();
if(cmsGnLoadDevice(&m_nNumDevices, m_DeviceList, &m_nNumAxes) != ERR_NONE)
{
//Handle 은 사용자가 생성한 폼의 핸들 값입니다.
// 에러메시지 출력
return;
}
/***************************************************************
* OnSetSpeed : 이 함수는 속도설정의 변경이 필요할 때
* 호출되는 가상의 함수 입니다.
***************************************************************/
#define MAP0 0 //맵번호 (0)
#define MAP1 1 //맵번호 (1)
void OnSetSpeed()
{
cmsIxMapAxes(DEV0, MAP0, cmsX1_MASK | cmsY1_MASK, cmsIX_MODE_LINEAR);
cmsIxMapAxes(DEV0, MAP1, cmsX1_MASK | cmsY1_MASK, cmsIX_MODE_CIRCULAR );
//또는 cmsIxMapAxes(DEV0, MAP0, 0x3, cmsIX_MODE_LINEAR);
//cmsIxMapAxes(DEV0, MAP1, 0x3, cmsIX_MODE_CIRCULAR);
//보간 이동할 축들의 기본속도를 설정합니다.
cmsCfgSetSpeedPattern(0, cmsSMODE_T, 1000, 5000, 5000,0,0);
cmsCfgSetSpeedPattern(cmsY1, cmsSMODE_T, 1000, 5000, 5000,0,0);
}
/**************************************************************
* OnDoMotion() : 작업명령시에 호출되는 가상의 함수
**************************************************************/
void OnDoMotion()
{
double fPosList[2];
//MAP0를 마스터 속도 모드, Trapezoidal 속도 패턴으로 작업속도의 100%,
//가속도의 70%, 감속도의 70%로 설정 합니다.
cmsIxSetSpeedPattern(DEV0, MAP0, cmsFALSE, cmsSMODE_T,0,0, 100, 70, 70 );
cmsIxSetSpeedPattern(DEV0, MAP1, cmsFALSE, cmsSMODE_T,0,0, 100, 70, 70 );
// Move from P1 to P2 //
cmsIxArcPTo(DEV0, MAP1, 1000, 0, 1000, 1000, cmsARC_CW, cmsFALSE);
// Move from P2 to P3 //
fPosList[0]=2000; fPosList[1]=1000;
cmsIxLineTo(DEV0, MAP0, fPosList, cmsFALSE);
// Move from P3 to P4 //
cmsIxArcPTo(DEV0, MAP1, 2000, 500, 2500, 500, cmsARC_CW, cmsFALSE);
// Move from P4 to P5 //
fPosList[0]=2500; fPosList[1]=-500;
cmsIxLineTo(DEV0, MAP0, fPosList, cmsFALSE);
// Move from P5 to P6 //
cmsIxArcPTo(DEV0, MAP1, 2000, -500, 2000, -1000, cmsARC_CW, cmsFALSE);
// Move from P6 to P7 //
fPosList[0]=1000; fPosList[1]=-1000;
cmsIxLineTo(MAP0, fPosList, cmsFALSE);
// Move from P7 to P1 //
cmsIxArcPTo(DEV0, MAP1, 1000, 0, 0, 0, cmsARC_CW, cmsFALSE);
}
-----------------------------------------------------------
Visual Basic
‘맵번호 MAP0, MAP1은 이미 선언되어 있다고 가정함.
Const DEV0 = 0
'/**************************************************************
'* OnSetSpeed : 이 함수는 속도설정의 변경이 필요할 때
'* 호출되는 가상의 함수 입니다.
'**************************************************************/
Private Sub OnSetSpeed()
Call IxMapAxes(DEV0, MAP0, &H3, cmsIX_MODE_LINEAR)
Call IxMapAxes(DEV0, MAP1, &H3, cmsIX_MODE_CIRCULAR)
'//또는 IxMapAxes(DEV0, MAP0, 0x3, cmsIX_MODE_LINEAR)
'//IxMapAxes(DEV0, MAP1, 0x3, cmsIX_MODE_CIRCULAR)
'//보간 이동할 축들의 기본속도를 설정합니다.
Call CfgSetSpeedPattern(DEV0, 0, cmsSMODE_T, 1000, 5000, 5000,0,0)
Call CfgSetSpeedPattern(DEV0, cmsY1, cmsSMODE_T, 1000, 5000, 5000,0,0)
End Sub
'/**************************************************************
'* OnDoMotion() : 작업명령시에 호출되는 가상의 함수
'**************************************************************/
Private Sub OnDoMotion()
Dim fPosList(2) As Double
'//MAP0를 마스터 속도 모드, Trapezoidal 속도 패턴으로 작업속도의 100%,
'//가속도의 70%, 감속도의 70%로 설정 합니다.
Call IxSetSpeedPattern(DEV0, MAP0, cmsFALSE, cmsSMODE_T,0,0, 100, 70, 70)
Call IxSetSpeedPattern(DEV0, MAP1, cmsFALSE, cmsSMODE_T,0,0, 100, 70, 70)
'// Move from P1 to P2 //
Call IxArcPTo(DEV0, MAP1, 1000, 0, 1000, 1000, cmsARC_CW, cmsFALSE)
'// Move from P2 to P3 //
fPosList(0) = 2000
fPosList(1) = 1000
Call IxLineTo(DEV0, MAP0, fPosList(0), cmsFALSE)
'// Move from P3 to P4 //
Call IxArcPTo(DEV0, MAP1, 2000, 500, 2500, 500, cmsARC_CW, cmsFALSE)
'// Move from P4 to P5 //
fPosList(0) = 2500
fPosList(1) = -500
Call IxLineTo(DEV0, MAP0, fPosList(0), cmsFALSE)
'// Move from P5 to P6 //
Call IxArcPTo(DEV0, MAP1, 2000, -500, 2000, -1000, cmsARC_CW, cmsFALSE)
'// Move from P6 to P7 //
fPosList(0) = 1000
fPosList(1) = -1000
Call IxLineTo(DEV0, MAP0, fPosList(0), cmsFALSE)
'// Move from P7 to P1 //
Call IxArcPTo(DEV0, MAP1, 1000, 0, 0, 0, cmsARC_CW, cmsFALSE)
End Sub
-----------------------------------------------------------
|