|
|
- Alarm(ALM) 신호의 입력 로직입니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 (cmxLOGIC_A): A 접점 방식 => 평상시 Open 감지되면 Close 되는 스위치 방식
- 1 (cmxLOGIC_B): B 접점 방식 => 평상시 Close 감지되면 Open 되는 스위치 방식
|
|
|
- Alarm 입력이 ON 되어 해당 축의 모션 작업이 정지할 때 정지되는 방식을 설정합니다 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 : 즉시 정지
- 1 : 감속 후 정지
|
|
|
- 위치비교출력(CMP) 신호의 출력 방식을 설정합니다.
- 0 (Active low) : 평상시 HIGH 상태를 유지. 트리거 시점에서 LOW로
- 1(Active high) : 평상시 LOW 상태를 유지. 트리거 시점에서 HIGH로
|
|
|
- -/+ DR 신호의 입력 로직을 설정합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 (cmxLOGIC_A) : A접점 방식
- 1 (ccmxLOGIC_B) : B접점 방식
|
|
|
- -/+ EL 신호의 입력 로직을 설정합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 (cmxLOGIC_A) : A접점 방식
- 1 (ccmxLOGIC_B) : B접점 방식
|
|
|
- -/+ EL 신호가 ON되어 정지할 때 정지 방식을 설정합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 : 즉시 정지
- 1 : 감속 후 정지
|
|
|
- ERC 신호의 출력 로직을 설정합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 (cmxLOGIC_A) : A접점 방식
- 1 (ccmxLOGIC_B) : B접점 방식
|
|
|
- 원점복귀 완료 시에 ERC 출력 여부를 설정합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 (cmxFALSE) : 원점복귀 완료 시에 ERC 출력 없음.
- 1 (cmxTRUE) : 원점복귀 완료 시에 ERC 출력.
|
|
|
- EZ(엔코더 Z상) 신호의 입력 로직을 설정합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 (cmxLOGIC_A) : A접점 방식
- 1 (ccmxLOGIC_B) : B접점 방식.
|
|
|
- INP 신호 입력 활성화 여부를 설정합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 (cmxFALSE) : INP 비활성
- 1 (cmxTRUE) : INP 활성 => Command 출력이 완료되더라도 INP 신호가
ON되기 전까지는 작업이 완료되지 않은 것으로 간주.
|
|
|
- INP(Inposition) 신호의 입력 로직을 설정합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 (cmxLOGIC_A) : A접점 방식
- 1 (ccmxLOGIC_B) : B접점 방식.
|
|
|
- LTC(Latch) 신호의 입력 로직을 설정합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 (cmxLOGIC_A) : A접점 방식
- 1 (ccmxLOGIC_B) : B접점 방식.
|
|
|
- 두 번째 LATCH COUNTER의 대상 카운터를 설정합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 : Deviation counter value
- 1 : Preset speed of command pulse
|
|
|
- ORG(원점 센서) 신호의 입력 로직을 설정합니다. 설정 및 반환값의 PropVal은 다음과 같습니다.
- 0 (cmxLOGIC_A) : A접점 방식
- 1 (ccmxLOGIC_B) : B접점 방식.
|
|
|
- SD(Start of Deceleration) 신호의 입력 상태를 설정합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 (cmxFALSE) : SD 입력을 비활성화 합니다.
- 1 (cmxTRUE) : SD 입력을 활성화 합니다. 활성화 되었을 때 SD 신호에 따른
동작 방식은 cmxMPID_SD_LATCH 와 cmxMPID_SD_MODE 설정 값에 의해 결정됩니다.
|
|
|
- SD(Start of Deceleration) 신호의 입력 로직을 설정합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 (cmxLOGIC_A) : A접점 방식
- 1 (ccmxLOGIC_B) : B접점 방식.
|
|
|
- SD(Start of Deceleration) 신호를 래치(Latch)할 것인지에 대한 속성값입니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 (cmxFALSE) : SD가 ON되어 감속중이거나 초기속도로 운전 중일 때
SD신호가 다시 OFF상태로 변경되면 작업속도까지 다시 가속됩니다.
- 1 (cmxTRUE) : SD가 ON상태에서 OFF상태로 바뀌어도 작업속도로 가속하지 않습니다.
|
|
|
- SD 신호에 따른 동작 모드를 설정합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 : SD신호가 ON되면 초기속도까지 감속합니다(정지하지 않음).
- 1 : SD신호가 ON되면 감속 후 정지합니다.
|
|
|
- STA 신호 모드를 설정합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 : STA 입력 신호는 무시되며, 이동 명령이 내려지면 바로 이동을 시작합니다.
- 1 : 이동 명령이 내려져도 바로 이동을 시작하지 않고, STA 신호가 ON이 되면 이동을 시작합니다.
|
|
|
- STA 신호가 ON되는 형태를 설정합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 : Level (LOW) => STA 신호가 LOW LEVEL일때 ON
- 1 : Falling Edge => STA 신호가 HIGH상태에서 LOW상태로 천이될 때 ON
|
|
|
- STP 신호 모드를 설정합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 : Ignore STP => STP 입력 신호 무시
- 1 : Immediate stop => STP 입력이 ON되면 즉시 정지
- 2 : Stop after decel => STP 입력이 ON되면 감속 후 정지
|
|
|
- CLR 신호가 입력되었을 때 CLEAR 되도록 할 모션컨트롤러의 카운터를 선택합니다. 이 값은 4비트의 값으로 설정하며 각 비트는 다음과 같이 각 카운터의 클리어 여부를 설정합니다.
- Bit 0 : Command counter의 클리어 여부를 설정
- Bit 1 : Feedback counter의 클리어 여부를 설정
- Bit 2 : Deviation counter의 클리어 여부를 설정
- Bit 3 : General counter의 클리어 여부를 설정
|
|
|
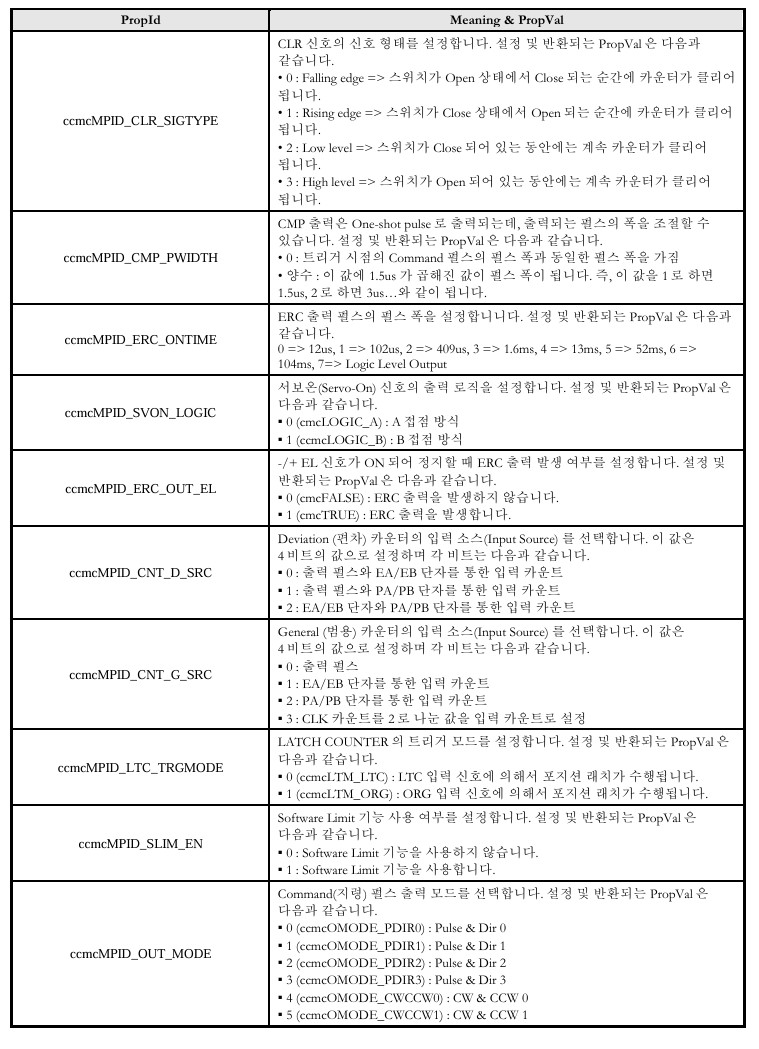
- CLR 신호의 신호 형태를 설정합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0: Falling edge => 스위치가 Open 상태에서 Close되는 순간에 카운터가 클리어 됩니다.
- 1 : Rising edge => 스위치가 Close 상태에서 Open되는 순간에 카운터가 클리어 됩니다.
- 2 : Low level => 스위치가 Close되어 있는 동안에는 계속 카운터가 클리어 됩니다.
- 3 : High level => 스위치가 Open되어 있는 동안에는 계속 카운터가 클리어 됩니다.
|
|
|
- CMP 출력은 One-shot pulse로 출력되는데, 출력되는 펄스의 폭을 조절할 수 있습니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0: 트리거 시점의 Command 펄스의 펄스 폭과 동일한 펄스 폭을 가짐
- 양수: 이 값에 1.5us 가 곱해진 값이 펄스 폭이 됩니다. 즉, 이 값을 1로하면
- 1.5us, 2로하면 3us…와 같이 됩니다.
|
|
|
- ERC 출력 펄스의 펄스 폭을 설정합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 => 12us, 1 => 102us, 2 => 409us, 3 => 1.6ms, 4 => 13ms, 5 => 52ms, 6 => 104ms, 7=> Logic Level Output
|
|
|
- 서보온(Servo-On) 신호의 출력 로직을 설정합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 (cmxLOGIC_A) : A 접점 방식
- 1 (cmxTRUE) : B 접점 방식
|
|
|
- -/+ EL 신호가 ON 되어 정지할 때 ERC 출력 발생 여부를 설정합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 (cmxFALSE): ERC 출력을 발생하지 않습니다.
- 1 (cmxTRUE): ERC 출력을 발생합니다.
|
|
|
- Deviation(편차) 카운터의 입력 소스(Input Source)를 선택합니다. 이 값은 4 비트의 값으로 설정하며 각 비트는 다음과 같습니다.
- 0 : 출력 펄스와 EA/EB 단자를 통한 입력 카운트
- 1 : 출력 펄스와 PA/PB 단자를 통한 입력 카운트
- 2 : EA/EB 단자와 PA/PB 단자를 통한 입력 카운트
|
|
|
- General(범용) 카운터의 입력 소스(Input Source)를 선택합니다. 이 값은 4 비트의 값으로 설정하며 각 비트는 다음과 같습니다.
- 0 : 출력 펄스
- 1 : EA/EB 단자를 통한 입력 카운트
- 2 : PA/PB 단자를 통한 입력 카운트
- 3 : CLK 카운트를 2로 나눈 값을 입력 카운트로 설정
|
|
|
- LATCH COUNTER 의 트리거 모드를 설정합니다. 설정 및 반환되는 PRopVal 은 다음과 같습니다.
- 0 (ccmxLTM_LTC) : LTC 입력 신호에 의해서 포지션 래치가 수행됩니다.
- 1 (ccmxLTM_ORG) : ORG 입력 신호에 의해서 포지션 래치가 수행됩니다.
|
|
|
- Software Limit 기능 사용 여부를 설정합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 : Software Limit 기능을 사용하지 않습니다.
- 1 : Software Limit 기능을 사용합니다.
|
|
|
- Command(지령) 펄스 출력 모드를 선택합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 (ccmxOMODE_PDIR0) : Pulse & Dir 0
- 1 (ccmxOMODE_PDIR1) : Pulse & Dir 1
- 2 (ccmxOMODE_PDIR2) : Pulse & Dir 2
- 3 (ccmxOMODE_PDIR3) : Pulse & Dir 3
- 4 (ccmxOMODE_CWCCW0) : CW & CCW 0
- 5 (ccmxOMODE_CWCCW0) : CW & CCW 1
|
|
|
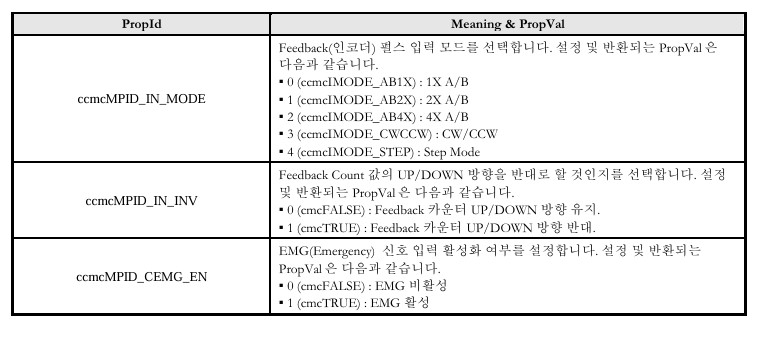
- Feedback(인코더) 펄스 입력 모드를 선택합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 (ccmxIMODE_AB1X) : 1X A/B
- 1 (ccmxIMODE_AB2X) : 2X A/B
- 2 (ccmxIMODE_AB4X) : 4X A/B
- 3 (ccmxIMODE_CWCCW) : CW/CCW
- 4 (ccmxIMODE_STEP) : Step Mode
|
|
|
- Feedback Count 값의 UP/DOWN 방향을 반대로 할 것인지를 선택합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 (cmxFALSE) : Feedback 카운터 UP/DOWN 방향 유지.
- 1 (cmxTRUE) : Feedback 카운터 UP/DOWN 방향 반대.
|
|
|
- EMG(Emergency) 신호 입력 활성화 여부를 설정합니다. 설정 및 반환되는 PropVal은 다음과 같습니다.
- 0 (cmxFALSE) : EMG 비활성
- 1 (cmxTRUE) : EMG 활성
|