cmlPmIxArcPStart¶
SYNOPSYS¶
VT_I4 cmlPmIxArcPStart([in] VT_I4 BoardID, [in] VT_I4 NodeId, [in] VT_I4 MapIndex,
[in] VT_R8 XCentOffset, [in] VT_R8 YCentOffset, [in] VT_R8 XEndPointDist,
[in] VT_R8 YEndPointDist, [in] VT_I4 Direction )
DESCRIPTION¶
cmlPmIxArcPStart() 함수는 중심좌표와 종점좌표를 매개 변수로 하여 원호보간 이송을 수행합니다. 이때 각 좌표는 상대좌표로 표현됩니다. cmlPmIxArcPStart() 함수는 모션을 시작시킨 후에 바로 반환됩니다.
원호보간은 임의의 두 축에 대해서 적용됩니다. 아래 설명에서는 맵핑된 두 축을 X, Y축으로 간주하여 설명합니다. 여기서 X축이라 함은 맵핑된 두 축 중에서 축번호가 낮은 축을 의미하며 Y축은 축번호가 높은 축을 의미합니다. 예를 들어 Z축과 U축이 맵핑된 두 축이라면 Z축이 X축에 해당하며 U축이 Y축에 해당합니다.
이 함수의 사용과 호출에 있어, 제공된 ㈜커미조아의 함수 헤더 Visual Basic 에서는 함수의 첨두어 cml 가 붙지 않습니다.
PARAMETER¶
▶ BoardId: 사용자가 설정한 디바이스(보드) ID.
▶ NodeId : 사용자가 제어하고자 하는 노드 번호.
▶ MapIndex : 맵번호(Map index), 이 맵번호를 사용하기 전에 먼저 cmlPmIxMapAxes() 함수를 통하여 해당 맵번호에 유효한 축들이 맵핑 되어 있어야 합니다.
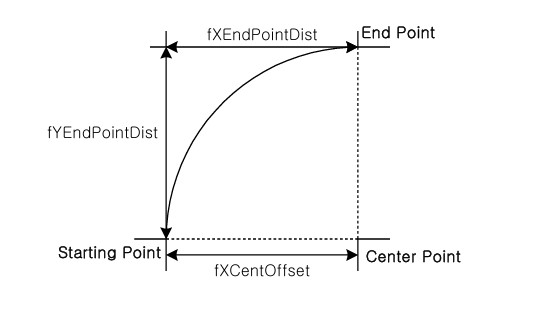
▶ XCentOffset : 현재 위치(시작 위치)로부터 원의 중심까지 X축상의 거리를 설정합니다.
▶ YCentOffset : 현재 위치(시작 위치)로부터 원의 중심까지 Y축상의 거리를 설정합니다.
▶ XEndPointDist : 원호보간 이송을 완료할 목표 지점의 현재 위치로부터 X축상의 거리를 설정합니다.
▶ YEndPointDist : 원호보간 이송을 완료할 목표 지점의 현재 위치로부터 Y축상의 거리를 설정합니다.
▶ Direction : 회전 방향을 지정합니다
Value
Meaning
0 또는 cmlARC_CW
시계 방향(CW)으로 회전
1 또는 cmlARC_CCW
반시계 방향(CCW)으로 회전
RETURN VALUE¶
Value |
Meaning |
|---|---|
음수 |
수행 실패 |
ERR_NONE |
수행 성공 |
REFERENCE¶
cmlPmIxArcPStart() 함수를 사용하는 경우에는 cmlPmIxIsDone() 함수나 cmlPmIxWaitDone() 함수를 사용하여 모션의 완료를 확인할 수 있습니다.
Note
“윈도우 이벤트라는 것은 무엇입니까?” 윈도우 운영체제는 Event Driven 혹은 Message Driven 방식1의 구조로 되어 있습니다. 각 응용프로그램은 메시지 큐(Queue)를 가지고 있으며, 정확히 말하면, 메시지를 사용해 이벤트를 통지하는 방식으로 설계되어 있습니다. 윈도우 메시지를 처리한다는 것은 메시지 큐에서 메시지를 하나씩 꺼내서 윈도우 프로시저에 전송한다는 것을 의미하며, 이것은 그 행선지가 되는 윈도우에 전송되어 처리됩니다.
EXAMPLE¶
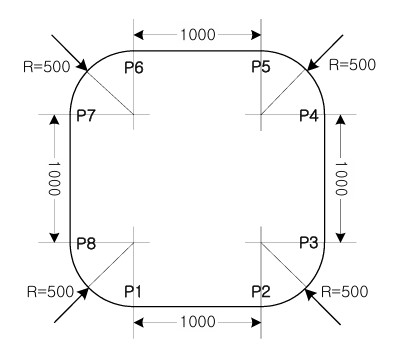
본 예제는 아래 그림과 같이 직선보간 이동과 원호보간 이동을 조합하는 Coordinated Motion을 수행하는 예제입니다. P1점으로부터 출발하여 P8점을 거쳐 다시 P1으로 복귀하는 작업입니다.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 | C/C++
#include “ComiMLink2_SDK.h”
#include “ComiMLink2_SDK_Def.h”
#define MAP0 0
#define NODE_ID 1
long BoardID = 0;
//0번 축과 1번 축을 MAP0로 설정합니다.
cmlPmIxMapAxes(BoardID, 0, MAP0, ccmlX1_MASK | ccmlY1_MASK );
//각 축의 속도를 설정합니다.
cmlPmCfgSetSpeedPattern(BoardID, 0, ccmlX1, cmlMODE_T, 1000, 5000, 5000 );
cmlPmCfgSetSpeedPattern(BoardID, 0, ccmlY1, cmlMODE_T, 1000, 5000, 5000 );
//맵에 포함된 축의 속도 비율을 설정합니다.
cmlPmIxSetSpeedPattern(BoardID, 0, MAP0, cmlFALSE, cmlMODE_T, 100, 70, 70 );
double fDistList[2] = {0.0f, 0.0f};
//P1에서 P2로 이송합니다.
fDistList[0] = 1000; fDistList[1] = 0;
cmlPmIxLineStart(BoardID, 0, MAP0, fDistList);
//P2에서 P3로 이송합니다.
cmlPmIxArcPStart(BoardID, 0, MAP1, 0, 500, 500, 500, ccmlARC_CCW);
//P3에서 P4로 이송합니다.
fDistList[0] = 0; fDistList[1] = 1000;
cmlPmIxLineStart(BoardID, 0, MAP0, fDistList);
//P4에서 P5로 이송합니다.
cmlPmIxArcPStart(BoardID, 0, MAP1, -500, 0, -500, 500, ccmlARC_CCW);
//P5에서 P6로 이송합니다.
fDistList[0] = -1000; fDistList[1] = 0;
cmlPmIxLineStart(BoardID, 0, MAP0, fDistList);
//P6에서 P7로 이송합니다.
cmlPmIxArcPStrat(BoardID, 0, MAP1, 0, -500, -500, -500, ccmlARC_CCW);
//P7에서 P8로 이송합니다.
fDistList[0] = 0; fDistList[1] = -1000;
cmlPmIxLineStart(BoardID, 0, MAP0, fDistList);
//P8에서 P1로 이송합니다.
cmlPmIxArcPStart(BoardID, 0, MAP1, 500, 0, 500, -500, ccmlARC_CCW);
|